Swin-Unet最强分割网络
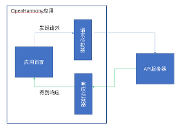
Swin-Unet是基于Swin Transformer为基础(可参考Swin Transformer介绍 ),结合了U-Net网络的特点(可参考Tensorflow深度学习算法整理(三) 中的U-Net)组合而成的新的分割网络

它与Swin Transformer不同的地方在于,在编码器(Encoder)这边虽然跟Swin Transformer一样的4个Stage,但Swin Transformer Block的数量为[2,2,2,1],而不是Swin Transformer的[2,2,6,2]。而在解码器(Decoder)这边,由于是升采样,使用的不再是Patch Embedding和Patch Merging,而使用的是Patch Expanding,它是Patch Merging的逆过程。
我们来看一下Patch Expanding的代码实现
from einops import rearrange
class PatchExpand(nn.Module): """ 块状扩充,尺寸翻倍,通道数减半 """ def __init__(self, input_resolution, dim, dim_scale=2, norm_layer=nn.LayerNorm): """ Args: input_resolution: 解码过程的feature map的宽高 dim: frature map通道数 dim_scale: 通道数扩充的倍数 norm_layer: 通道方向归一化 """ super().__init__() self.input_resolution = input_resolution self.dim = dim # 通过全连接层来扩大通道数 self.expand = nn.Linear(dim, 2 * dim, bias=False) if dim_scale == 2 else nn.Identity() self.norm = norm_layer(dim // dim_scale) def forward(self, x): """ x: B, H*W, C """ H, W = self.input_resolution # 先把通道数翻倍 x = self.expand(x) B, L, C = x.shape assert L == H * W, "input feature has wrong size" x = x.view(B, H, W, C) # 将各个通道分开,再将所有通道拼成一个feature map # 增大了feature map的尺寸 x = rearrange(x, 'b h w (p1 p2 c)-> b (h p1) (w p2) c', p1=2, p2=2, c=C // 4) # 通道翻倍后再除以4,实际相当于通道数减半 x = x.view(B, -1, C // 4) x = self.norm(x) return x
在编码器这边基本上跟Swin Transformer是一样的,我们重点来看解码器这边。它是使用BasicLayer_up类来对SwinTransformerBlock和Patch Expanding来进行搭配的。
class BasicLayer_up(nn.Module): """ A basic Swin Transformer layer for one stage. 一个BasicLayer_up包含偶数个SwinTransformerBlock和一个upsamele层(即Patch Expanding层) """ def __init__(self, dim, input_resolution, depth, num_heads, window_size, mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0., norm_layer=nn.LayerNorm, upsample=None, use_checkpoint=False): """ Args: dim: feature map通道数 input_resolution: feature map的宽高 depth: 各个Stage中,Swin Transformer Block的数量 num_heads: 多头注意力各个Stage中的头数 window_size: 窗口自注意力机制的窗口中的patch数 mlp_ratio: 层感知机模块中第一个全连接层输出的通道倍数 qkv_bias: 如果是True的话,对自注意力公式中的Q、K、V增加一个可学习的偏置 qk_scale: 窗口自注意力公式常数 drop: dropout rate,默认为0 attn_drop: 用于自注意力机制中的dropout rate,默认为0 drop_path: 在Swin Transformer Block中,有一定概率丢弃整个直连分支,包括 LN、W-MSA或者SW-MSA,只保留直连的连接,是一种网络深度的随机性,默认为0 norm_layer: 通道方向归一化 upsample: 使用Patch Expanding来升采样 use_checkpoint: 是否使用Pytorch中间数据保存机制 """ super().__init__() self.dim = dim self.input_resolution = input_resolution self.depth = depth self.use_checkpoint = use_checkpoint # build SwinTransformerBlock self.blocks = nn.ModuleList([ SwinTransformerBlock(dim=dim, input_resolution=input_resolution, num_heads=num_heads, window_size=window_size, # 用于区分是使用W-MSA还是SW-MSA,0为W-MSA,1为SW-MSA shift_size=0 if (i % 2 == 0) else window_size // 2, mlp_ratio=mlp_ratio, qkv_bias=qkv_bias, qk_scale=qk_scale, drop=drop, attn_drop=attn_drop, drop_path=drop_path[i] if isinstance(drop_path, list) else drop_path, norm_layer=norm_layer) for i in range(depth)]) # patch merging layer # 当stage=4的时候为None if upsample is not None: self.upsample = PatchExpand(input_resolution, dim=dim, dim_scale=2, norm_layer=norm_layer) else: self.upsample = None def forward(self, x): # 通过每一个SwinTransformerBlock for blk in self.blocks: if self.use_checkpoint: x = checkpoint.checkpoint(blk, x) else: x = blk(x) # 进行块状扩充(PatchExpanding)上采样 if self.upsample is not None: x = self.upsample(x) return x
SwinTransformerBlock跟SwinTransformer中的代码也是一样的,这里就不重复了。
然后还有一个从编码器到解码器之间的跳连。这里需要看一下Swin-Unet的主类代码
class SwinTransformerSys(nn.Module): """ Swin-UNet网络模型 """ def __init__(self, img_size=224, patch_size=4, in_chans=3, num_classes=1000, embed_dim=96, depths=[2, 2, 2, 2], depths_decoder=[1, 2, 2, 2], num_heads=[3, 6, 12, 24], window_size=7, mlp_ratio=4., qkv_bias=True, qk_scale=None, drop_rate=0., attn_drop_rate=0., drop_path_rate=0.1, norm_layer=nn.LayerNorm, ape=False, patch_norm=True, use_checkpoint=False, final_upsample="expand_first", **kwargs): """ Args: img_size: 原始图像尺寸 patch_size: 一个patch中的像素点数 in_chans: 进入网络的图片通道数 num_classes: 分类数量 embed_dim: feature map通道数 depths: 编码器各个Stage中,Swin Transformer Block的数量 depths_decoder: 解码器各个Stage中,Swin Transformer Block的数量 num_heads: 多头注意力各个Stage中的头数 window_size: 窗口自注意力机制的窗口中的patch数 mlp_ratio: 多层感知机模块中第一个全连接层输出的通道倍数 qkv_bias: 如果是True的话,对自注意力公式中的Q、K、V增加一个可学习的偏置 qk_scale: 自注意力公式中的常量 drop_rate: dropout rate,默认为0 attn_drop_rate: 用于自注意力机制中的dropout rate,默认为0 drop_path_rate: 在Swin Transformer Block中,有一定概率丢弃整个直连分支,包括 LN、W-MSA或者SW-MSA,只保留直连的连接,是一种网络深度的随机性,默认为0.1 norm_layer: 通道方向归一化 ape: 是否进行绝对位置嵌入,默认False patch_norm: 如果是True的话,在patch embedding之后加上归一化 use_checkpoint: 是否使用Pytorch中间数据保存机制 final_upsample: 解码器stage4后的Patch Expanding **kwargs: """ super().__init__() print("SwinTransformerSys expand initial----depths:{};depths_decoder:{};drop_path_rate:{};num_classes:{}".format(depths, depths_decoder, drop_path_rate, num_classes)) self.num_classes = num_classes # stage的数量 self.num_layers = len(depths) self.embed_dim = embed_dim self.ape = ape self.patch_norm = patch_norm # 编码器stage4输出特征的通道数(Swin-Tiny:768) self.num_features = int(embed_dim * 2 ** (self.num_layers - 1)) # 解码器stage4输出特征的通道数(192) self.num_features_up = int(embed_dim * 2) self.mlp_ratio = mlp_ratio self.final_upsample = final_upsample # 把图像分割成不重叠的patch self.patch_embed = PatchEmbed( img_size=img_size, patch_size=patch_size, in_chans=in_chans, embed_dim=embed_dim, norm_layer=norm_layer if self.patch_norm else None) num_patches = self.patch_embed.num_patches # 获取feature map的高宽 patches_resolution = self.patch_embed.patches_resolution self.patches_resolution = patches_resolution # 绝对位置嵌入 if self.ape: self.absolute_pos_embed = nn.Parameter(torch.zeros(1, num_patches, embed_dim)) trunc_normal_(self.absolute_pos_embed, std=.02) self.pos_drop = nn.Dropout(p=drop_rate) # 不同的stage,舍弃整个直连分支的概率不同,从小到大,最小为0,最大为0.1 dpr = [x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))] # stochastic depth decay rule # 创建编码器layers self.layers = nn.ModuleList() for i_layer in range(self.num_layers): # layer相当于stage layer = BasicLayer(dim=int(embed_dim * 2 ** i_layer), input_resolution=(patches_resolution[0] // (2 ** i_layer), patches_resolution[1] // (2 ** i_layer)), depth=depths[i_layer], num_heads=num_heads[i_layer], window_size=window_size, mlp_ratio=self.mlp_ratio, qkv_bias=qkv_bias, qk_scale=qk_scale, drop=drop_rate, attn_drop=attn_drop_rate, drop_path=dpr[sum(depths[:i_layer]):sum(depths[:i_layer + 1])], norm_layer=norm_layer, # 只有前3个stage有patchmerging,最后一个没有 downsample=PatchMerging if (i_layer < self.num_layers - 1) else None, use_checkpoint=use_checkpoint) self.layers.append(layer) # 创建解码器layers self.layers_up = nn.ModuleList() self.concat_back_dim = nn.ModuleList() for i_layer in range(self.num_layers): # layer相当于stage # 每一个stage结束后,通道数减半的全连接层 concat_linear = nn.Linear(2 * int(embed_dim * 2**(self.num_layers - 1 - i_layer)), int(embed_dim * 2**(self.num_layers - 1 - i_layer))) if i_layer > 0 else nn.Identity() if i_layer == 0: # 第一个stage只进行上采样 layer_up = PatchExpand(input_resolution=(patches_resolution[0] // (2 ** (self.num_layers - 1 - i_layer)), patches_resolution[1] // (2 ** (self.num_layers-1-i_layer))), dim=int(embed_dim * 2 ** (self.num_layers-1-i_layer)), dim_scale=2, norm_layer=norm_layer) else: layer_up = BasicLayer_up(dim=int(embed_dim * 2 ** (self.num_layers-1-i_layer)), input_resolution=(patches_resolution[0] // (2 ** (self.num_layers-1-i_layer)), patches_resolution[1] // (2 ** (self.num_layers-1-i_layer))), depth=depths[(self.num_layers-1-i_layer)], num_heads=num_heads[(self.num_layers-1-i_layer)], window_size=window_size, mlp_ratio=self.mlp_ratio, qkv_bias=qkv_bias, qk_scale=qk_scale, drop=drop_rate, attn_drop=attn_drop_rate, drop_path=dpr[sum(depths[:(self.num_layers-1-i_layer)]):sum(depths[:(self.num_layers - 1 - i_layer) + 1])], norm_layer=norm_layer, # 只有前3个stage有PatchExpand,最后一个没有 upsample=PatchExpand if (i_layer < self.num_layers - 1) else None, use_checkpoint=use_checkpoint) self.layers_up.append(layer_up) self.concat_back_dim.append(concat_linear) self.norm = norm_layer(self.num_features) self.norm_up = norm_layer(self.embed_dim) # 解码器最后一个stage进行FinalPatchExpand处理 if self.final_upsample == "expand_first": print("---final upsample expand_first---") self.up = FinalPatchExpand_X4(input_resolution=(img_size // patch_size, img_size // patch_size), dim_scale=4, dim=embed_dim) self.output = nn.Conv2d(in_channels=embed_dim, out_channels=self.num_classes, kernel_size=1, bias=False) self.apply(self._init_weights)
这里有一个FinalPatchExpand_X4的方法,我们来看一下它的实现
class FinalPatchExpand_X4(nn.Module): """ stage4之后的PatchExpand 尺寸翻倍,通道数不变 """ def __init__(self, input_resolution, dim, dim_scale=4, norm_layer=nn.LayerNorm): """ Args: input_resolution: feature map的宽高 dim: feature map通道数 dim_scale: 通道数扩充的倍数 norm_layer: 通道方向归一化 """ super().__init__() self.input_resolution = input_resolution self.dim = dim self.dim_scale = dim_scale # 通过全连接层来扩大通道数 self.expand = nn.Linear(dim, 16 * dim, bias=False) self.output_dim = dim self.norm = norm_layer(self.output_dim) def forward(self, x): """ x: B, H*W, C """ H, W = self.input_resolution # 先把通道数翻倍 x = self.expand(x) B, L, C = x.shape assert L == H * W, "input feature has wrong size" x = x.view(B, H, W, C) # 将各个通道分开,再将所有通道拼成一个feature map # 增大了feature map的尺寸 x = rearrange(x, 'b h w (p1 p2 c)-> b (h p1) (w p2) c', p1=self.dim_scale, p2=self.dim_scale, c=C//(self.dim_scale**2)) # 把扩大的通道数转成原来的通道数 x = x.view(B, -1, self.output_dim) x = self.norm(x) return x
回到SwinTransformerSys代码中
def _init_weights(self, m): """ 对全连接层或者通道归一化进行权重以及偏置的初始化 """ if isinstance(m, nn.Linear): trunc_normal_(m.weight, std=.02) if isinstance(m, nn.Linear) and m.bias is not None: nn.init.constant_(m.bias, 0) elif isinstance(m, nn.LayerNorm): nn.init.constant_(m.bias, 0) nn.init.constant_(m.weight, 1.0) @torch.jit.ignore def no_weight_decay(self): return {'absolute_pos_embed'} @torch.jit.ignore def no_weight_decay_keywords(self): return {'relative_position_bias_table'} #Encoder and Bottleneck def forward_features(self, x): """ 编码器过程 """ # 图像分割 x = self.patch_embed(x) # 绝对位置嵌入 if self.ape: x = x + self.absolute_pos_embed x = self.pos_drop(x) # 跳连点 x_downsample = [] # 通过各个编码过程的stage for layer in self.layers: x_downsample.append(x) x = layer(x) x = self.norm(x) # B L C return x, x_downsample #Dencoder and Skip connection def forward_up_features(self, x, x_downsample): """ 解码器过程,包含了跳连拼接 """ # 通过各个解码过程的stage for inx, layer_up in enumerate(self.layers_up): if inx == 0: x = layer_up(x) else: # 拼接编码器的跳连部分再进入Swin Transformer Block x = torch.cat([x, x_downsample[3-inx]], -1) x = self.concat_back_dim[inx](x) x = layer_up(x) x = self.norm_up(x) # B L C return x def up_x4(self, x): """ 完成解码器的最后一个stage后进入 """ H, W = self.patches_resolution B, L, C = x.shape assert L == H * W, "input features has wrong size" if self.final_upsample == "expand_first": x = self.up(x) x = x.view(B, 4 * H, 4 * W, -1) x = x.permute(0, 3, 1, 2) #B,C,H,W x = self.output(x) return x def forward(self, x): """ 前向运算 """ x, x_downsample = self.forward_features(x) x = self.forward_up_features(x, x_downsample) x = self.up_x4(x) return x def flops(self): flops = 0 flops += self.patch_embed.flops() for i, layer in enumerate(self.layers): flops += layer.flops() flops += self.num_features * self.patches_resolution[0] * self.patches_resolution[1] // (2 ** self.num_layers) flops += self.num_features * self.num_classes return flops
|








- 上一条: 深度解析智能运维下告警关联频繁项集挖掘算法原理 2022-06-09
- 下一条: 一些有趣的B+树优化实验 2022-06-09
相关文章
- 全卷积网络(FCN)实战:使用FCN实现语义分割 2022-03-18
- 一次“不负责任”的 K8s 网络故障排查经验分享 2021-06-27
- 用OneFlow实现基于U型网络的ISBI细胞分割任务 2021-12-17
- 带你读AI论文丨LaneNet基于实体分割的端到端车道线检测 2021-08-27
- 【CVPR2022】用于域适应语义分割的域无关先验 2022-06-20
热度排行