飞桨助力动车3C车载智能识别,为动车组运行保驾护航

项目背景
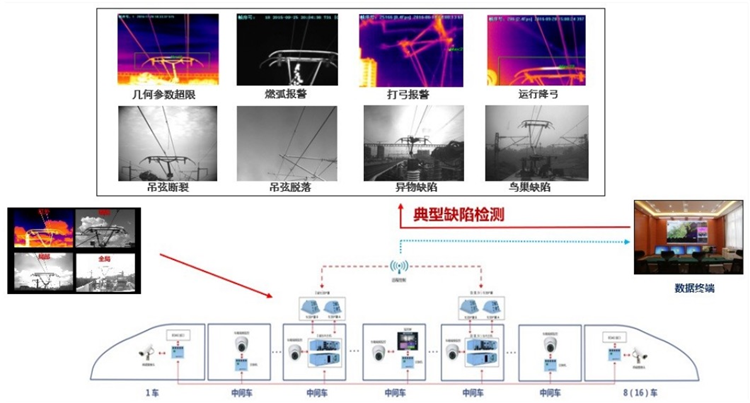
动车组车载接触网运行状态检测装置(3C)是指在运营动车组上安装的车载接触网运行状态检测装置。其随动车组运行,全天候等速在线检测监测接触网、弓网匹配运行状态,检测监测接触网⼏何参数、红外图像、可见光图像等结果,并将结果用于指导接触网维修。
受到接触网张力、机械震动、天气、设备运行寿命等因素影响,接触网运营过程中易出现典型缺陷,如有鸟害、接触网吊弦断裂、接触网吊弦脱落、接触网吊弦松弛、异物缠绕等,虽然该类缺陷在短时间内不能直接造成严重病害结果,但积累后可能引发接触网塌网等重大事故,从而造成列车停运。同时列车运行过程中,由于受到接触网参数改变、异物等因素影响,可造成击打、击毁受电弓的重大事故,使用常规方法很难短时间定位事故详情。该类事故的监测虽不能预防当前事故发生,但捕捉事故后,能对后续列车的运行提供准确的运营指导,大幅度降低事故影响面及经济损失。
本项目基于3C可见光图像,研究如何落地一套车载实时智能识别系统,能够监控接触网检测、受电弓监测中的部分高危缺陷。

为了观测并捕捉接触网部件缺失、松脱、异物及受电弓异常等影响行车安全事件的情况,3C设备需要具有全天候、开放环境、实时性的运行特点,因此需要边云一体化的车地协同方案,以解决户外场景复杂、数据量庞大、实时分析的困难。但因车载硬件资源有限、车载设备功率限定等因素,均不利于车载实时分析。因此本项目通过⼈⼯智能手段,依托有限车载运算资源进一步在保持检测指标的基础上压榨计算时间、增加检测内容,实现边采集图像数据,边实时分析图像缺陷的边缘智能感知功能,弥补了3C数据分析量大、分析及时性不足问题,使得接触网相关重要缺陷能够在运营车运行过程中被及时发现与上报,为供电检测的智能化提供有效手段。
项目介绍
接触网检测
数据准备及预处理:
数据类别:包含鸟害、吊弦断、吊弦脱、异物四类。
数据数量:共计约1万张图像。
数据划分:采用分层采样分割数据集,每个类别在训练集、验证集、测试集中的比例尽可能接近6:2:2。
预处理注意事项:
1. 数据集目标较细,而户外环境经常出现逆光情况,因此对数据增强中的亮度调节要把握尺度;
2. 针对部分图像resize后失真导致目标对象歧义的缺陷,需要保持图像的原始比例;
3. 若服务器产生CPU瓶颈,可以在reader.yml中使用DecodeCache代替Decode,以释放部分CPU压力。
模型训练及评估
针对车载边缘检测场景,本项目选用了基于飞桨目标检测套件PaddleDetection 的PP-PicoDet系列模型进行实验。
1.调整超参数后,执行命令进行多卡训练,同时开启VisualDL及训练时评价。
1. export CUDA_VISIBLE_DEVICES=0,1,2,3
2. python -m paddle.distributed.launch --gpus 0,1,2,3 tools/train.py
3. -c /xsw/train/model/C3/picodet/picodet_s_416.yml
4. --use_vdl=true
5. --vdl_log_dir=/xsw/train/model/C3/picodet/vdl_dir_picodet_s_416/scalar
6. --eval2.观测VisualDL训练状态。
1. visualdl --logdir \\10.2.3.25\shareXSW\train\model\C3\picodet\vdl_dir_picodet_s_416\scalar --port=80413.基于最佳模型,计算验证集、测试集单类AP。
1. python tools/eval.py -c /xsw/train/model/C3/picodet/picodet_s_416.yml
2. -o weights=/xsw/train/model/C3/picodet/output/picodet_s_416/picodet_s_416/best_model
3. --classwise4.验证集评价结果,如下表所示。
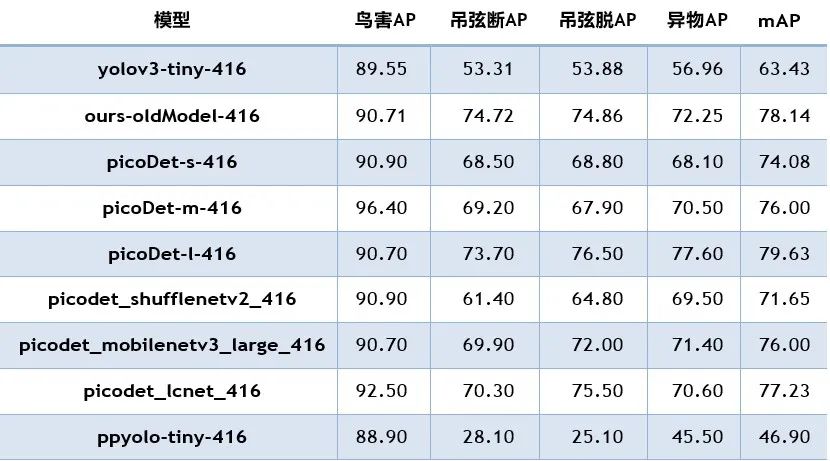
5.测试集评价结果如下表所示。

模型部署
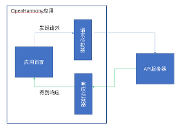
因既有设备还需承担数据采集、几何参数测量计算等任务,可利用CPU资源有限。根据经济因素、运维因素及功率限定的考量,我们利用了空闲的集成显卡,采用基于OpenVINO的部署方式。该方式具备较低的推理时长及较低的CPU占用,为剩余业务留出空间。
模型导出可参照:PaddleDetection
模型导出为ONNX格式教程:https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.3/deploy/EXPORT_ONNX_MODEL.md
1. 导出飞桨部署模型:
1. python tools/export_model.py -c /xsw/train/model/C3/picodet/picodet_s_416.yml
2. -o weights=/xsw/train/model/C3/picodet/output/picodet_s_416/picodet_s_416/best_model.params
3. TestReader.inputs_def.image_shape=[3,416,416]
4. --output_dir /xsw/train/model/C3/picodet/inference_model2.导出PaddleDetection模型为ONNX:
1paddle2onnx --model_dir /xsw/train/model/C3/picodet/inference_model/picodet_s_416
2--model_filename model.pdmodel
3--params_filename model.pdiparams
4--opset_version 11
5--save_file /xsw/train/model/C3/picodet/picodet_s_416.onnx3. 基于OpencvDNN模块使用ONNX模型:这里需要说明,OpenCV的DNN模块针对集成显卡推理具备基于OpenCV和基于IntelNGRAPH的两种后端,相应的使用方法不同可能造成巨幅的推理时长变化。
1)基于OpenCV后端
该模块可直接读取ONNX模型,但网络中的OperationsSets支持有限,更多OperationsSets需要自定义。
既有OperationsSets支持参考:
Thesupportedlayers
https://github.com/opencv/opencv/wiki/Deep-Learning-in-OpenCV
自定义Operations Sets参考:
tutorial_dnn_custom_layers
https://docs.opencv.org/4.x/dc/db1/tutorial_dnn_custom_layers.html
2)基于IntelNGRAPH后端
该模块可直接读取ONNX模型及IR模型。
a、读取ONNX模型将在线通过NGRAPH优化后运行,支持OperationsSets相对较多,使用简便;
b、读取IR模型是最佳的方式,经实验其能最大化减少推理时长,但其需要优先安装OpenVINO,并利用其将ONNX模型优化为IR模型,但因集成显卡驱动因素影响其尽量适用于Intel四代CPU之后的硬件设备;
既有OperationsSets支持参考:AvailableOperationsSets
https://docs.openvino.ai/latest/openvino_docs_ops_opset7.html#doxid-openvino-docs-ops-opset7
IR模型转换参考:
ConvertaPaddlePaddleModeltoONNXandOpenVINOIR
https://docs.openvino.ai/latest/notebooks/103-paddle-onnx-to-openvino-classification-with-output.html
2. 数据后处理参考:
PicoDetPostProcess
https://github.com/PaddlePaddle/PaddleDetection/blob/develop/deploy/cpp/src/picodet_postprocess.cc
3. 推理时间如下表所示。
GPU:Intel HD Graphics 530
CPU:Intel(R) Core(TM) i7-6700 CPU @3.40GHz 3.41GHz
VPU:Movidius MyriadX
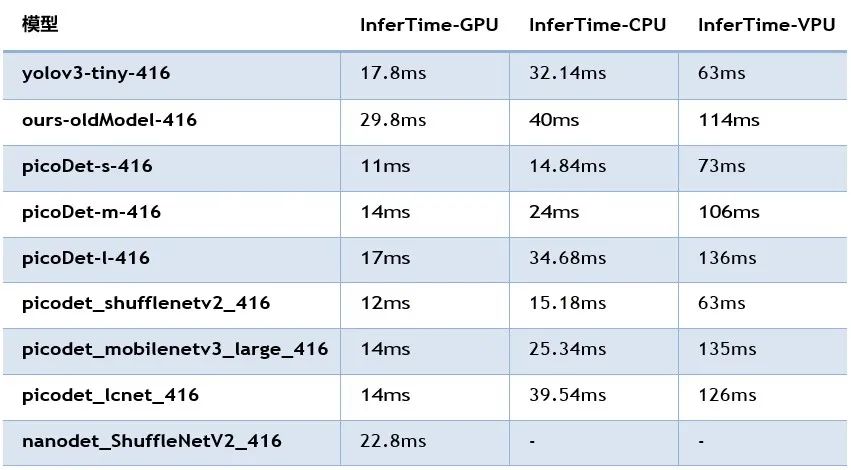
项目选用picodet_lcnet_416模型,指标较原有自定义模型提升2%,推理速度加速53%,为进⼀步业务算法实施提供了可能性。
受电弓监测
针对车载边缘检测场景,本项目选用了基于PaddleDetection的keypoint模型实验。
数据准备及预处理
数据类别:内部数据集设计包含10个受电弓关键点;数据数量:共计约2千张图像;
数据划分:采用分层采样分割数据集,使得每个类别训练集:验证集尽可能接近8:2。
模型训练及评估
不同于通用的行人姿态检测,本项目姿态检测为受电弓,数据集目标对象将发生迁移。基于关键点的自定义数据集训练,因目标关键点数量和关键点含义的变化,需要修改几处内容:
1.因关键点数量及目标对象的变化,需要修改部分源码及配置:
1. # *.yml 训练配置,仅列举因目标对象和关键点数量变化的关键参数
2. num_joints: &num_joints 10
3. train_height: &train_height 288
4. train_width: &train_width 384
5. #输出热⼒图尺⼨(宽,高)
6. hmsize: &hmsize [96, 72]
7. #左右关键点经图像翻转时对应关系
8. flip_perm: &flip_perm [[0, 1], [2, 3], [4, 5], [6, 7], [8, 9]]2.当前PaddleDetection中的关键的检测评价指标是基于coco OKS的,其OKS中的kpt_oks_sigmas参数来源于coco关键点数据集。因自定义关键点数据集的关键点数量、标注内容变化,需要修改相应的kpt_oks_sigmas适配自定义数据集。(kpt_oks_sigmas含义为每个关键点各自的数据集标准差,COCO上是对同⼀个目标的5000次不同标注产生的标准差。其值越大,说明在整个数据集中对这个点的标注一致性越差; 值越小,说明整个数据集中对这个点的标注一致性越好。如coco数据集中:{鼻子:0.026,眼睛:0.025,耳朵:0.035,肩膀:0.079,手肘:0.072,手腕:0.062,臀部:0.107,膝盖:0.087,脚踝:0.089})
1#ppdet/metrics/metrics.py
2COCO_SIGMAS = ...
3#ppdet/modeling/keypoint_utils.py def oks_iou(...):
4...
5sigmas = ...
6...
7
8# 库中pycocotools的cocoeval.py class Params:
9...
10def setKpParams(self):
11...
12self.kpt_oks_sigmas = ...
13...3.如果希望可视化关键点骨架结果,也需要修改相应源码:
1. #ppdet/utils/visualizer.py
2. EDGES= ...4. 调整超参数后,执行训练并开启visualDL及训练时评价。
1#训练
2python tools/train.py -c /xsw/train/model/C3_BowPt/hrnet/dark_hrnet.yml
3--use_vdl=true
4--vdl_log_dir=/xsw/train/model/C3_BowPt/hrnet/vdl_dir_hrnet_dark_hrnet/scalar
5--eval
6
7#观测
8visualdl --logdir \\10.2.3.25\shareXSW\train\model\C3_BowPt\hrnet\vdl_dir_hrnet_dark_hrnet\scalar --port
9=8041
10
11#评价
12python tools/eval.py -c /xsw/train/model/C3_BowPt/hrnet/dark_hrnet.yml
13-o Global.checkpoints=/xsw/train/model/C3_BowPt/hrnet/output/dark_hrnet_w32/best_model.pdparams5.使用模型推理未标注数据测试。
1. python tools/infer.py -c /xsw/train/model/C3_BowPt/hrnet/dark_hrnet.yml
2. -o weights=/xsw/train/model/C3_BowPt/hrnet/output/dark_hrnet/best_model.pdparams
3. --infer_dir=/xsw/train/data/C3_BowPt_cut/poc/val/images
4. --draw_threshold=0.2
5. --save_txt=True
6. --output_dir=/xsw/train/model/C3_BowPt/hrnet/output/infer_dark_hrnet6.验证集评价结果。

模型部署
1.导出飞桨部署模型。
1. python tools/export_model.py -c /xsw/train/model/C3_BowPt/hrnet/dark_hrnet.yml
2. -o weights=/xsw/train/model/C3_BowPt/hrnet/output/dark_hrnet/best_model.pdparams
3. --output_dir /xsw/train/model/C3_BowPt/hrnet/inference_model2.导出PaddleDetection模型为ONNX。
1. paddle2onnx --model_dir /xsw/train/model/C3_BowPt/hrnet/inference_model/dark_hrnet
2. --model_filename model.pdmodel
3. --params_filename model.pdiparams
4. --opset_version 11
5. --save_file /xsw/train/model/C3_BowPt/hrnet/dark_hrnet.onnx3. 推理时间如下表所示。
GPU:IntelHDGraphics530
CPU:Intel(R)Core(TM)i7-6700CPU@3.40GHz3.41GHz

项目效果
接触网检测结果可视化

鸟害

吊弦脱
吊弦断

异物
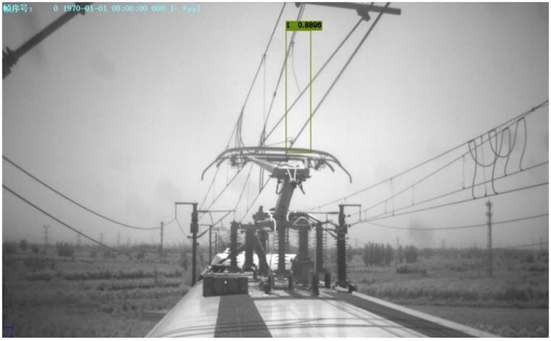
受电弓监测结果可视化

总体效果
截止目前新版算法已扩展部署动车30辆、机车16辆,单月累积巡线超过170万KM,检出上述类型缺陷超过3000个。
欢迎关注PaddleDetection:https://github.com/PaddlePaddle/PaddleDetection
相关推荐
使用关键点检测打造小工具Padoodle,让涂鸦小人跟随真人学跳舞
详解Swin Transformer核心实现,经典模型也能快速调优
基于飞桨实现的“太空保卫战士”——地球同步静止轨道空间目标检测系统
美景本天成,妙笔偶得之——“妙笔”是怎样炼成的?
基于PaddleX构建专属行车助手,为交通安全保驾护航
如何低成本高效监控电瓶车违规停放行为?看看飞桨开发者怎么做
飞桨开发者又出新工具!让AI也能听懂你的话
PaddleHub元宇宙直通车:手把手教你造个虚拟数字人
强迫症狂喜!PC端相册还能智能分类!
关注【飞桨PaddlePaddle】公众号
获取更多技术内容~
觉得内容不错的话,点个“在看”呗
本文同步分享在 博客“飞桨PaddlePaddle”(CSDN)。
如有侵权,请联系 support@oschina.cn 删除。
本文参与“OSC源创计划”,欢迎正在阅读的你也加入,一起分享。
|








- 上一条: 缓存最关心的问题是什么 2022-03-18
- 下一条: 解密GaussDB(for Influx)时序洞察 2022-03-18
- 30倍加速,3毫秒极速识别,人、车、OCR等9大识别任务一网打尽 2022-06-15
- 百度智能云飞桨一体机全新发布,云智一体破解AI落地“最后一公里”难题 2021-09-18
- 从浏览器渲染层面解析css3动效优化原理 2021-09-27
- 大赛报名|来自飞桨黑客松的邀请函 2021-09-27
- 一文了解百度飞桨EasyDL如何实现海洋馆动物自动识别 2022-07-12