近邻搜索算法浅析
简介
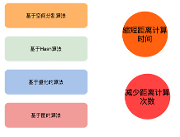
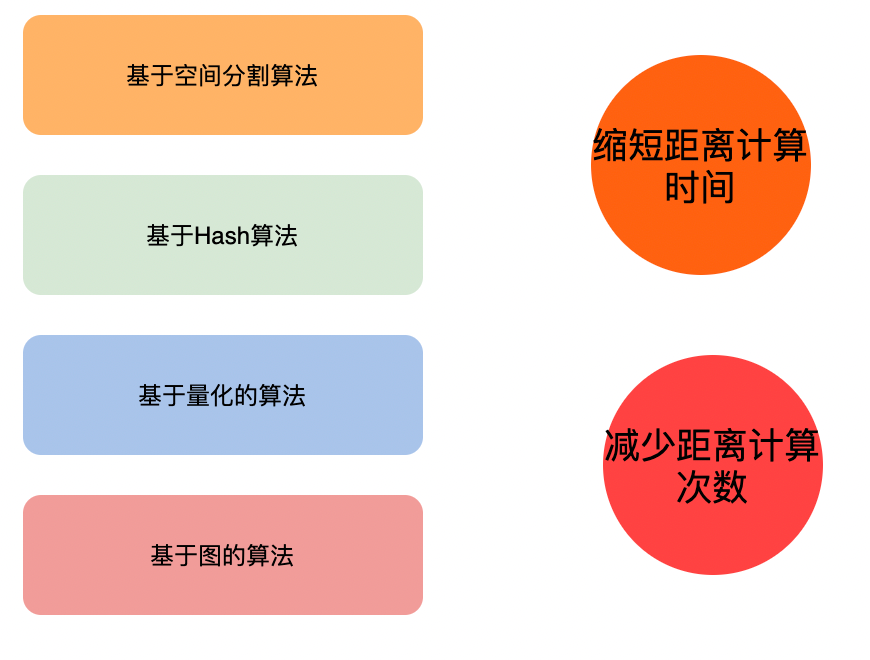
随着深度学习的发展和普及,很多非结构数据被表示为高维向量,并通过近邻搜索来查找,实现了多种场景的检索需求,如人脸识别、图片搜索、商品的推荐搜索等。另一方面随着互联网技术的发展及5G技术的普及,产生的数据呈爆发式增长,如何在海量数据中精准高效的完成搜索成为一个研究热点,各路前辈专家提出了不同的算法,今天我们就简单聊下当前比较常见的近邻搜索算法。
主要算法
Kd-Tree
K-dimension tree,二叉树结构,对数据点在k维空间(如二维 (x,y),三维(x,y,z),k维(x,y,z..))中划分。
构建过程
- 确定split域的值(轮询 or 最大方差)
- 确定Node-data的域值(中位数 or 平均值)
- 确定左子空间和右子空间
- 递归构造左右子空间
查询过程
- 进行二叉搜索,找到叶子结点
- 回溯搜索路径,进入其他候选节点的子空间查询距离更近的点
- 重复步骤2,直到搜索路径为空
性能
理想情况下的复杂度是O(K log(N)) 最坏的情况下(当查询点的邻域与分割超平面两侧的空间都产生交集时,回溯的次数大大增加)的复杂度为维度比较大时,直接利用K-d树快速检索(维数超过20)的性能急剧下降,几乎接近线性扫描。
改进算法
Best-Bin-First:通过设置优先级队列(将“查询路径”上的结点进行排序,如按各自分割超平面与查询点的距离排序)和运行超时限定(限定搜索过的叶子节点树)来获取近似的最近邻,有效地减少回溯的次数。采用了BBF查询机制后Kd树便可以有效的扩展到高维数据集上 。
Randomized Kd tree:通过构建多个不同方向上的Kd tree,在各个Kd tree上并行搜索部分数量的节点来提升搜索性能(主要解决BBF算法随着Max-search nodes增长,收益减小的问题)
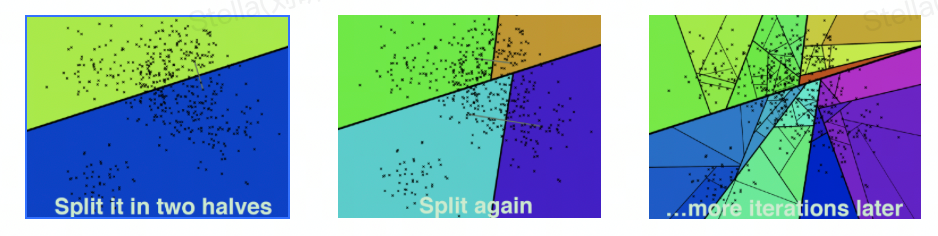
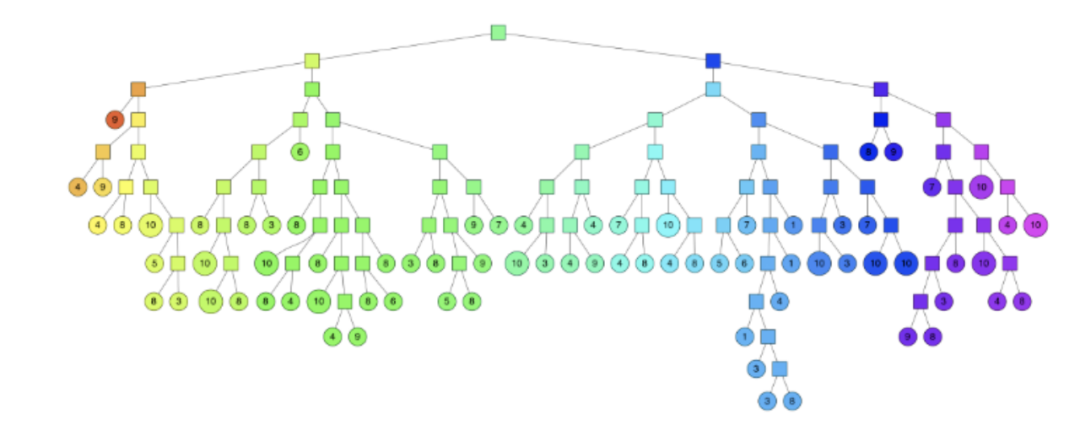
Hierarchical k-means trees
类似k-means tree,通过聚类的方法来建立一个二叉树来使得每个点查找时间复杂度是O(log n) 。
构建过程 :
- 随机选择两个点,执行k为2的聚类,用垂直于这两个聚类中心的超平面将数据集划分
- 在划分的子空间内进行递归迭代继续划分,直到每个子空间最多只剩下K个数据节点
- 最终形成一个二叉树结构。叶子节点记录原始数据节点,中间节点记录分割超平面的信息
搜索过程
- 从根节点开始比较,找到叶子节点,同时将路径上的节点记录到优先级队列中
- 执行回溯,从优先级队列中选取节点重新执行查找
- 每次查找都将路径中未遍历的节点记录到优先级队列中
- 当遍历节点的数目达到指定阈值时终止搜索
性能
- 搜索性能不是特别稳定,在某些数据集上表现很好,在有些数据集上则有些差
- 构建树的时间比较长,可以通过设置kmeans的迭代次数来优化
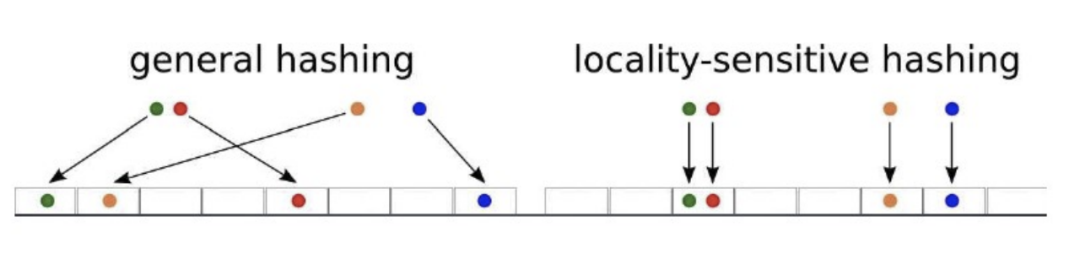
LSH
Locality-Sensitive Hashing 高维空间的两点若距离很近,他们哈希值有很大概率是一样的;若两点之间的距离较远,他们哈希值相同的概率会很小 。
一般会根据具体的需求来选择满足条件的hash函数,(d1,d2,p1,p2)-sensitive 满足下面两个条件(D为空间距离度量,Pr表示概率):
- 若空间中两点p和q之间的距离D(p,q)<d1,则Pr(h(p)=h(q))>p1
- 若空间中两点p和q之间的距离D(p,q)>d2,则Pr(h(p)=h(q))<p2
离线构建索引
- 选择满足(𝑅,𝑐𝑅,𝑃1,𝑃2)-sensive的哈希函数;
- 根据对查找结果的准确率(即相邻的数据被查找到的概率)确定哈希表的个数𝐿, 每个table内的hash functions的个数(也就哈希的键长𝐾),以及跟LSH hash function 自身有关的参数 ;
- 利用上面的哈希函数组,将集合中的所有数据映射到一个或多个哈希表中,完成索引 的建立。
在线查找
- 将查询向量𝑞通过哈希函数映射,得到相应哈希表中的编号
- 将所有哈希表中相应的编号的向量取出来,(保证查找速度,通常只取前2𝐿)
- 对这2𝐿个向量进行线性查找,返回与查询向量最相似的向量。
查询耗时主要为:
计算q的hash值(table id)+ 计算q与table中点的距离
查询效果方面由于损失了大量原始信息从而降低检索精度 。
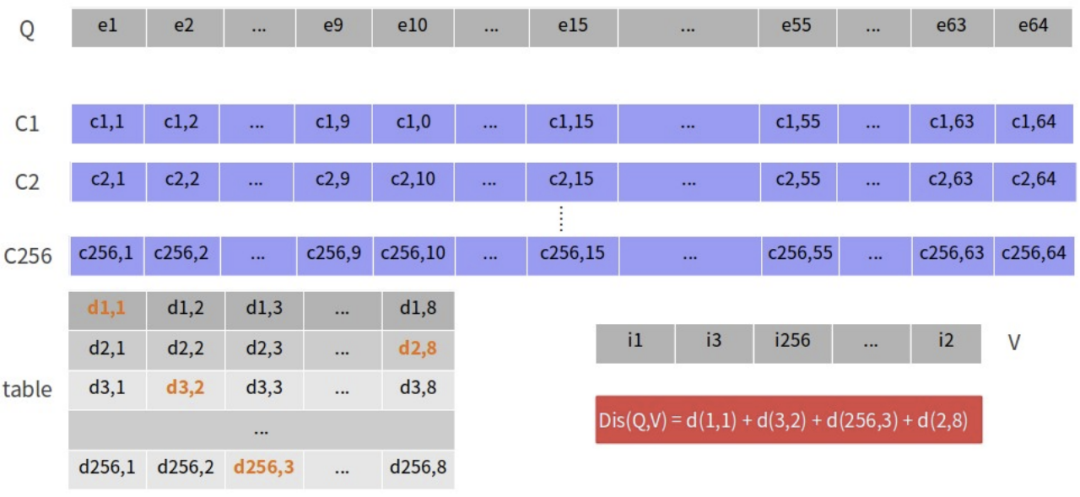
PQ
product quantization,把原来的向量空间分解为若干个低维向量空间的笛卡尔积,并对分解得到的低维向量空间分别做量化(quantization),这样每个向量就能由多个低维空间的量化code组合表示 。
需要选取最优的量化算法,我们熟知的k-means算法就是一个接近最优化的量化算法。
量化
使用k-means进行量化的过程
- 将原始向量切分为m组,每组内使用k-means聚类,产出m组,每组多个聚类中心
- 将原始向量编码为m维向量,向量中每个元素代表所在组聚类中心的id
查询过程
- 将搜索query划分子向量,计算子向量和对应段的所有簇心的距离,得到距离表(m×k*矩阵)
- 遍历样本库中的向量,根据距离表,计算每个样本与查询向量的距离和返回k个距离最接近的样本
距离计算
SDC(symmetric distance computation),对称的距离计算方法,对query向量和样本库中的向量都进行PQ量化,同时会在构建阶段会计算出每组向量各个聚类中心的距离,生成k*k的距离表,在查询阶段计算query向量和样本库中的向量时,通过查表即可,减少计算过程,但放大了误差。
ADC(Asymmetric distance computation),非对称的距离计算方案,只对样本库中的向量进行PQ量化,在查询阶段计算query向量和m组聚类中心的距离,生成m*k的距离表,然后查表计算与样本库中向量的距离,由于需要每次对查询向量实时计算,增加计算开销,但误差小。
优化
IVFPQ,基于倒排的乘积量化算法,增加粗量化阶段,对样本进行聚类,划分为较小的region ,减少候选集数据量(之前是需要遍历全量的样本,时间复杂度为O(N*M))。
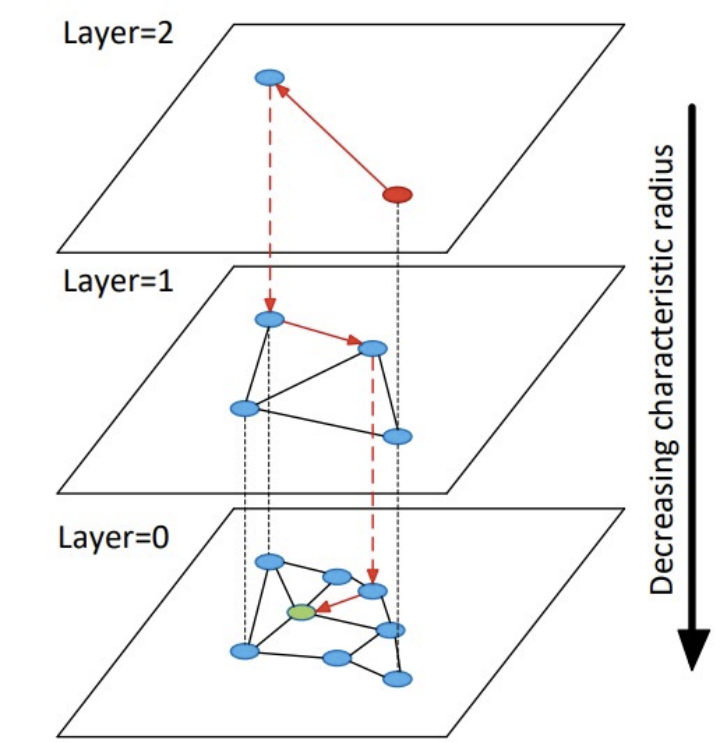
HNSW
在NSW算法之上进行改进的基于图的算法,使用分层的结构,在每层通过启发式方法来选择某节点的邻居(保证全局连通性),使其构成一张连通的图。
建图流程
- 计算节点的最大层次l;
- 随机选择初始入口点ep,L为ep点所在的最大层;
- 在L~l+1层,每层执行操作:在当前层找到距离待 插节点最近的节点ep,并作为下一层的输入;
- l层以下为待插元素的插入层,从ep开始查找距离待插元素 最近的ef个节点,从中选出M个与待插节点连接,并将这M 个节点作为下一层的输入;
- 在l-1~0层,每层执行操作:从M个节点开始搜索,找 到距离与待插节点最近的ef个节点,并选出M个与待插元素连接
查询流程
- 从顶层到倒数第二层,循环执行操作:在当前层寻找距离查询节点最近的一个节点放入候选集中,从候选集中选取出距离查询节点最近的一个节作为下一层的入口点;
- 从上层得到的最近点开始搜索最底层,获取ef个近邻点放入候选集中;
- 从候选集中选取出topk 。
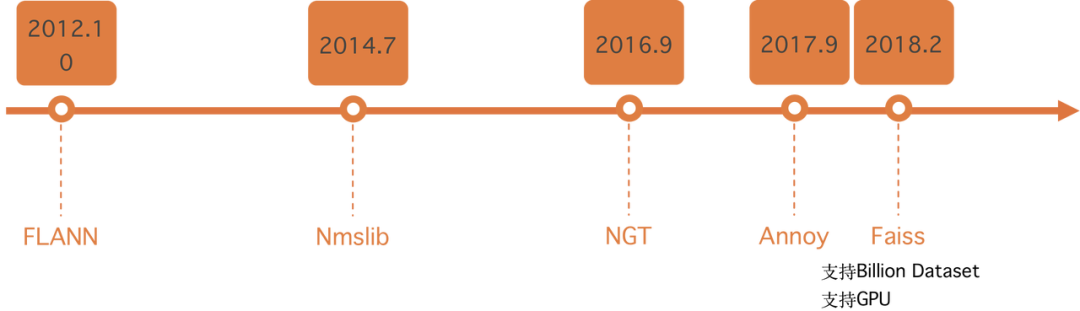
实现
当前有比较成熟的库实现了各种主流的近邻搜索算法,在项目中可以通过这些基础库来构建对应的近邻搜索服务,其中使用比较广泛的是faiss库,由Fackbook开源,在支持不同算法的同时,也支持在超大规模数据集上构建k近邻搜索以及支持GPU来加速索引构建和查询,同时社区活跃,在考虑到性能和可维护性,faiss库是构建近邻检索服务的比较好的选择。
总结
本文展示了当前比较常见的几种近邻搜索算法,并简单分析了各算法的原理;随着深度学习的不断发展,不同场景对近邻搜索的需求越来越多,必定会有新的算法不断地涌现,每种算法有它适合的场景,在选择不同算法时需要结合业务的需求,如数据量的大小,召回的效果,性能,资源消耗等各方面的因素,通过了解不同算法的实现,可以选择更适合当前业务的算法。
*文/张林
关注得物技术,每周一三五晚18:30更新技术干货
要是觉得文章对你有帮助的话,欢迎评论转发点赞~
|








- 上一条: 硬核公式计算研发工作优先级 2022-09-23
- 下一条: AICON 2022 参会指南来咯 2022-09-24
- 0基础都能看懂的算法图解 2021-07-19
- 二分搜索树的原理与Java源码实现 2021-07-09
- 二叉搜索树(Binary Search Tree)(Java实现) 2021-07-07
- 看动画学算法之:平衡二叉搜索树AVL Tree 2021-10-15
- 看动画学算法之:二叉搜索树BST 2021-12-08